
Советская школа волнового управления
В СССР после Гражданской войны велись работы по созданию телеуправляемых видов вооружений – танков, самолетов, катеров, торпед и даже подводных лодок. В интересах флота этими вопросами занималось, в частности, Особое техническое бюро по военным изобретениям специального назначения (Остехбюро) во главе с В.И. Бекаури.
В начале 1930-х годов под руководством К.В. Старчика была разработана сверхмалая субмарина АПСС (аэроподводный самодвижущийся снаряд). Лодка имела надводное водоизмещение 7,2 т, подводное – 8,5 т. Электродвигатель мощностью 8,1 кВт придавал ей подводную скорость до 4,5 узла, дальность хода в погруженном положении составляла 45–50 км. Доставлять АПСС в район боевого применения, а при необходимости и эвакуировать предполагалось самолетом – на шестимоторной двухкорпусной летающей лодке МК-1 («Морской крейсер»). Самолет спроектировали в ЦАГИ в начале 1930-х и построили в одном экземпляре.
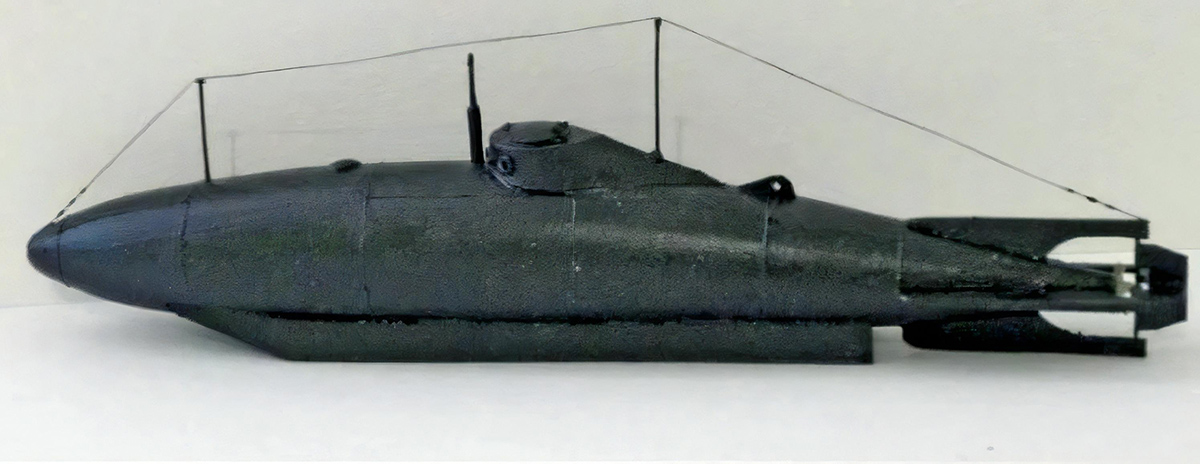
Модель сверхмалой подлодки АПСС
Vostock PhotoПодводную лодку можно было использовать в двух вариантах – пилотируемом (экипаж состоял из одного человека) или телеуправляемом. В первом случае АПСС вооружался торпедой, во втором – нес заряд взрывчатки весом 500 кг. Волновое управление (так тогда называлось дистанционное управление) осуществлялось с «водителей» – надводных кораблей или самолетов.
Разработанная Остехбюро аппаратура «Кварц» включала приемники УКВ- и ДВ-диапазонов. АПСС мог исполнять до 24 команд. Так как при погружении на глубину субмарина не могла принимать команды, то ее переключали на автоматическое программное управление. Для определения местонахождения АПСС в ночное время служили прожекторы, направленные вверх, в дневное – зеленый фосфоресцирующий состав, оставлявший на поверхности моря ясно различимый след.
В 1935-м на ленинградском заводе «Судомех» были построены два АПСС. Они успешно прошли заводские испытания, но в следующем году работы прекратились, а лодки разобрали. Причина – проблемы с системой дистанционного управления, а также наличие всего одного самолета-носителя. Серийно строить столь дорогие и сложные в эксплуатации машины, предназначенные исключительно для АПСС, военное руководство СССР посчитало нецелесообразным.
Роботы атакуют эскадру
В запасе у советского флота были и другие проекты морских беспилотников. В сентябре 1924 года Остехбюро приступило к испытаниям катера-торпеды «Пионер» с дистанционным управлением. Вскоре свой радиоуправляемый катер «Оса» продемонстрировал А.Ф. Шорин (1890–1941), известный изобретатель в области техники связи, звуковой кинематографии и телемеханики. Командование Красного флота заинтересовали его разработки, Шорину поручили создание системы волнового управления для торпедного катера. Между собой конкурировали Остехбюро и Центральная лаборатория проводной связи. По проекту Остехбюро, оператор располагался на корабле или катере, а по проекту ЦЛПС – на борту самолета.
В 1931 году в Финском заливе были проведены заключительные испытания автономных катеров двух типов. По их итогам госкомиссия весной 1932-го предложила принять на вооружение комплекс Александра Шорина.
Система волнового управления состояла из командно-передающей аппаратуры «Кварц» на станции управления и приемно-исполнительной аппаратуры «Вольт-Р» на торпедном катере. Всего было выпущено около 200 комплектов. К середине 1930-х в СССР наладили производство радиоуправляемых торпедных катеров на базе серийных Ш-4 и Г-5.
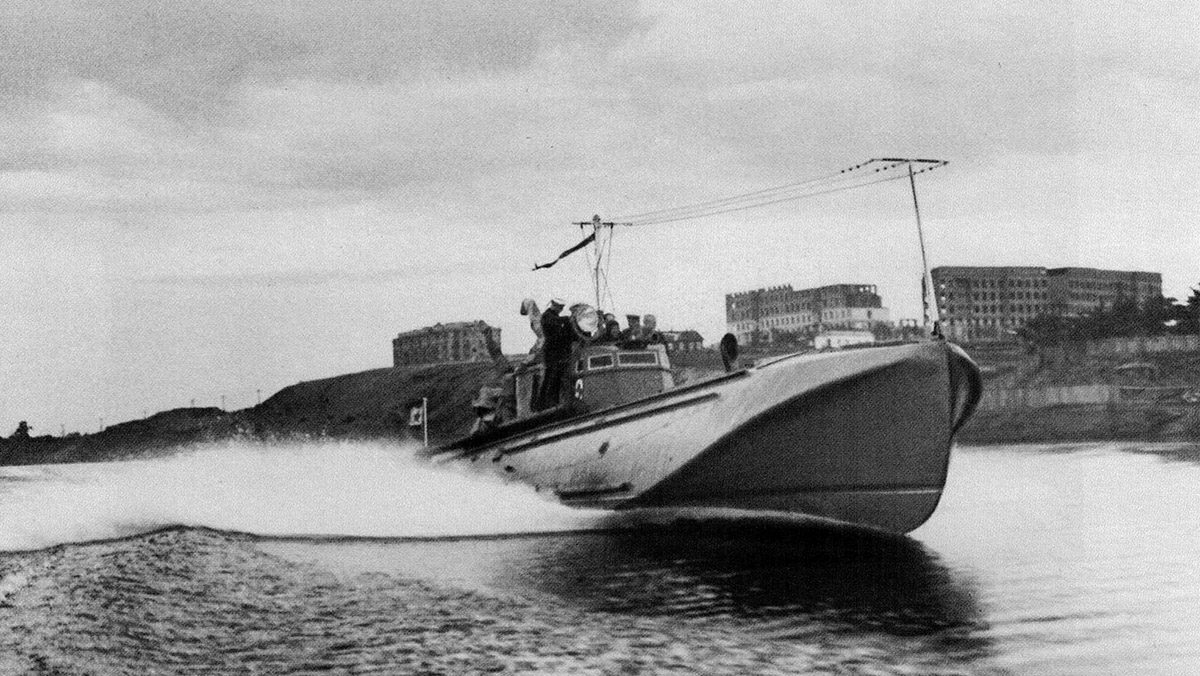
Торпедный катер Г-5, 1946-1948 годы
Vostock PhotoДля наведения на цель использовали гидросамолет МБР-2ВУ с двумя наблюдателями-операторами на борту. Это позволяло выводить в атаку одновременно два катера-камикадзе.
В 1934 году началось формирование дивизионов катеров волнового управления (по 24 единицы в каждом) и особых эскадрилий волнового управления на Балтийском, Черноморском и Тихоокеанском флотах. В октябре 1937-го в Финском заливе Балтийский флот проводил учения. На одном из этапов в атаке на надводные корабли участвовало почти 50 катеров-роботов. Несмотря на то, что несколько из них вышли из строя из-за технических неполадок, в итоговом докладе отмечалось: новое оружие в состоянии решать боевые задачи.
В годы Великой Отечественной войны катера волнового управления советский ВМФ применял крайне редко. На Черноморском флоте зимой 1943-го торпедные дроны-камикадзе трижды атаковали немецкие корабли в Керченском проливе в районе мыса Камыш-Бурун (управление осуществлялось с кавказского побережья) – безуспешно.
Немецкие «Линзе» и «Торнадо»
Телеуправляемые катера (проект «Линзе») применяли и немцы. Разработка началась в 1942 году. В качестве прототипа взяли итальянский взрывающийся катер МТМ. В апреле 1944-го первые «Линзе» вступили в строй. Всего было выпущено около 1400 штук. Это были катера водоизмещением 1,8–1,85 т, длиной 5,5–5,98 м, шириной 1,58–1,75 м, способные нести заряд взрывчатого вещества весом от 300 до 480 кг. Бензиновый мотор мощностью 95 л.с. позволял развивать скорость до 33 узлов. При скорости 15 узлов дальность плавания составляла 80–100 морских миль.

Катер Linse ("Линзе") немецкого флота во время Второй мировой войны. Германия, 1944 год
Vostock Photo«Линзе» применяли звеньями в составе двух ударных телеуправляемых катеров и катера управления с экипажем из трех человек – водителя и двух операторов систем радиоуправления. Атаки производились исключительно ночью. Катера подходили к неприятелю со скоростью 8–12 узлов, используя специальные глушители. За несколько сот метров водители ударных катеров давали полный ход, включали дистанционное управление и прыгали за борт – их подбирали катера управления.
При ударе в борт цели или по радиокоманде оператора происходил подрыв вспомогательного заряда, и морской дрон начинал тонуть. С задержкой в несколько секунд взрывался основной заряд. Катер в этот момент находился ниже ватерлинии вражеского корабля, что должно было нанести максимальный ущерб.
Массово ударные катера с радиоуправлением применялись немцами для противодействия десантной операции англичан и американцев в Нормандии летом 1944 года. Было потоплено несколько кораблей и транспортов союзников. В декабре 1944-го «Линзе» планировали применить на Восточном фронте. Для уничтожения мостов через Вислу было переброшено несколько катеров. Операцию в последний момент отменили – на реке начался ледостав.
В гитлеровской Германии велись работы над катерами-роботами и более совершенных конструкций. Проект «Торнадо» представлял собой катамаран с реактивным пульсирующим двигателем (как на ракетах Фау-1), что позволяло развивать скорость до 65 узлов. Однако война закончилась раньше, чем эти беспилотники запустили в серийное производство.
Дорогу морским десантам
Телеуправляемые катера были и у союзников СССР по антигитлеровской коалиции. Их применяли для проделывания проходов в противодесантных заграждениях. В основе американского проекта «Стингрей» – десантный катер LCVP, груженый несколькими тоннами взрывчатки. Впервые их использовали против японцев на Тихом океане, но результаты оказались неудовлетворительными.
Усовершенствованную версию (проект «Апекс») американцы применили в ходе десантной операции на юге Франции. Тактику изменили: вперед пускали легкие и быстроходные катера, несшие одну тонну взрывчатки, следом – тяжелые и тихоходные с 3,6 т взрывчатки. Это позволило проделывать широкие бреши для прохода судов с десантом. В дальнейшем беспилотные «Апексы» пригодились во время ядерных испытаний на атолле Бикини (1946 год). С их помощью брали пробы воды из лагуны.

Гусеничный транспортер-амфибия LVT на атолле Кваджалейн, Маршалловы острова,1944 год
Peter Newark Pictures / Bridgeman Images/Vostock PhotoАмериканцы переделывали в роботы и гусеничные транспортеры-амфибии типа LVT-2. Начиненные взрывчаткой машины должны были уничтожать подводные и береговые заграждения, укрепления японцев на островах. Для управления использовали радар. Испытания беспилотных LVT-2 провели во Флориде в 1945 году, но на войну они не успели – Япония капитулировала.
Продолжение следует.












